
- 2020-6-28
- 最新情報
- 3DPrinting, 3Dプリンティング, 3Dモデリング, AI, Boston Dynamics, Education, FDM・FFF, filament, Open Sourse, robot, オープンソース, テクノロジー, フィラメント, ロボット, 教材, 教育

NYUとMPI-ISの研究チームが低コストな3Dプリント製オープンソース4足歩行ロボットを発表
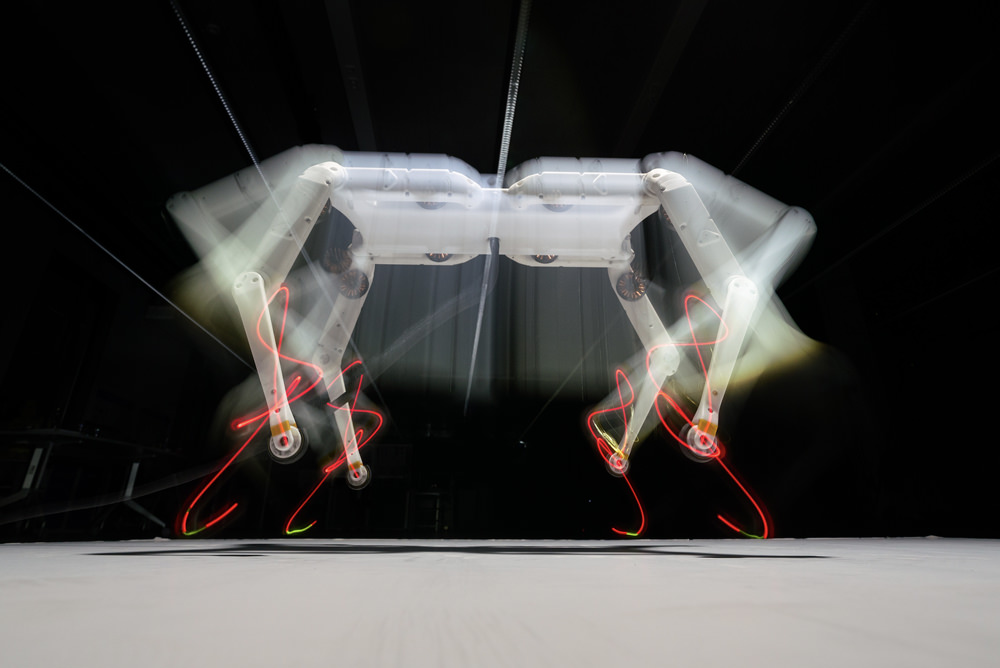
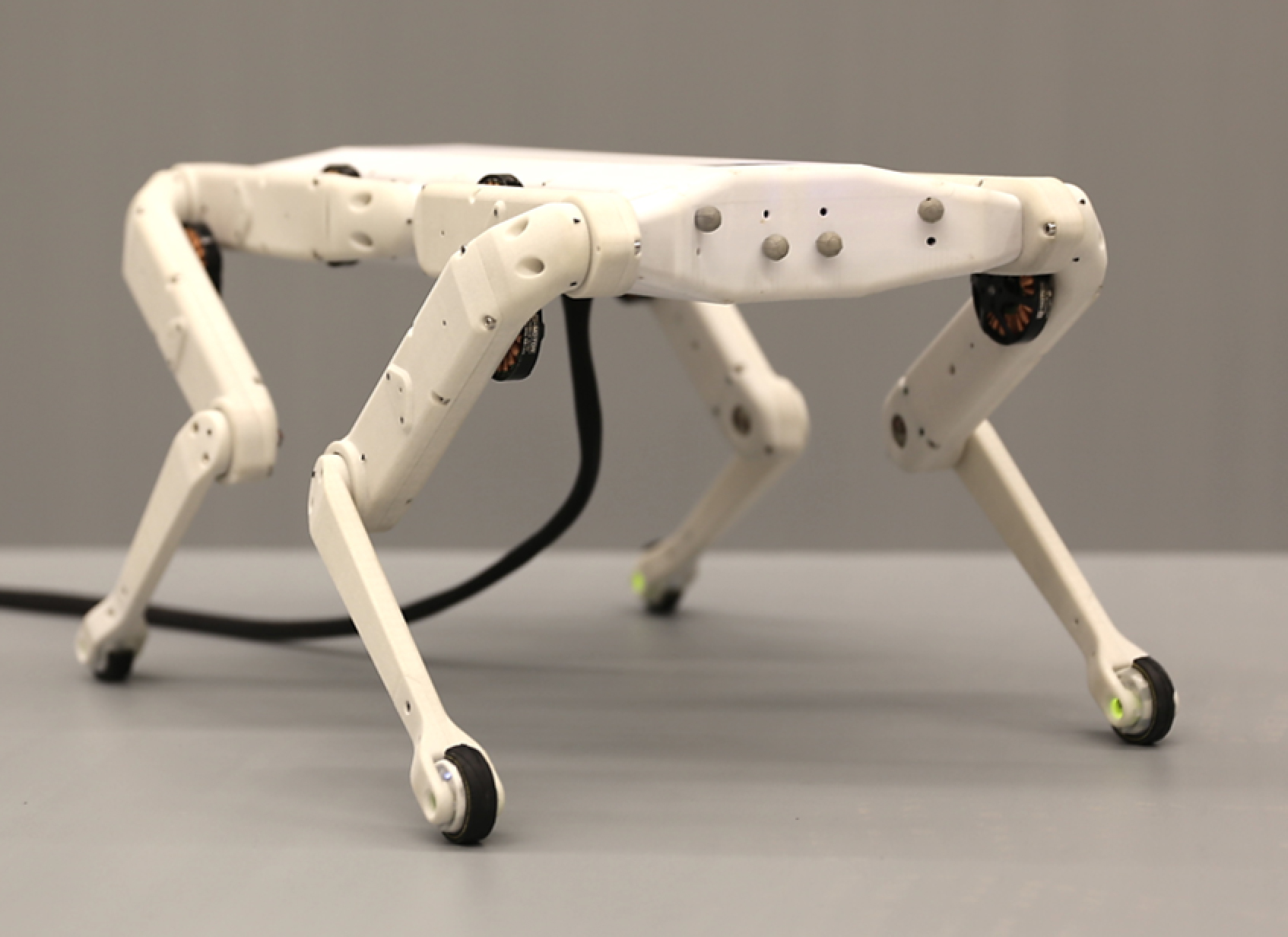
ニューヨーク大学タンドン工学部(NYU Tandon School of Engineering)とドイツのマックスプランク知能システム研究所(The Max Planck Institute for Intelligent Systems/MPI-IS)の共同研究チームが「Solo 8」と名付けられた3Dプリント製4足歩行ロボットを設計し、オープンソースとしてその情報を公開した。
ボストン・ダイナミクスの4足歩行ロボット「SPOT」に酷似したこのロボットは、完全にオープンソース化された4足歩行ロボットで、誰でも簡単にアップグレードまたは修正して組み立てることができるシステムとなっている。
本家の「SPOT(開発者向け EXPLORER)」が約800万円なのに対し「Solo 8」は、高性能なブラシレスDCモーターや手頃な価格の小型センサー、低消費電力マイクロコントローラー、バッテリーなど、機械加工されたモーターシャフトとプーリー以外は全て市販の部品と3Dプリンタで構成されているため、スタートアップや小規模な研究施設、教育機関など限られた予算で運営される研究チームでも気軽に利用することができる。

Boston Dynamics の4足歩行ロボット「SPOT」
3Dプリントされたボディと4本の足から構造される「Solo 8」の大きさは、胴体の長さ42cm×幅33cm、重さ2.2kgと軽量で、有線またはWiFiで制御することが可能。また、配線類は全て3Dプリントされたシェル内に収められるため、ケーブル類の露出などが無い構造になっている。さらに、必要な部品点数が非常に少ないため、高度な知識がなくても簡単にモジュールを組み立てることができる。
小さくて軽量化な「Solo 8」は、研究室などの狭いスペースでも研究者一人で制御することができる。この特徴は、学習アルゴリズムを実際のハードウェア上で直接テストする際に重要であり、迅速かつ安全にコストを抑えたテスト環境を構築する。
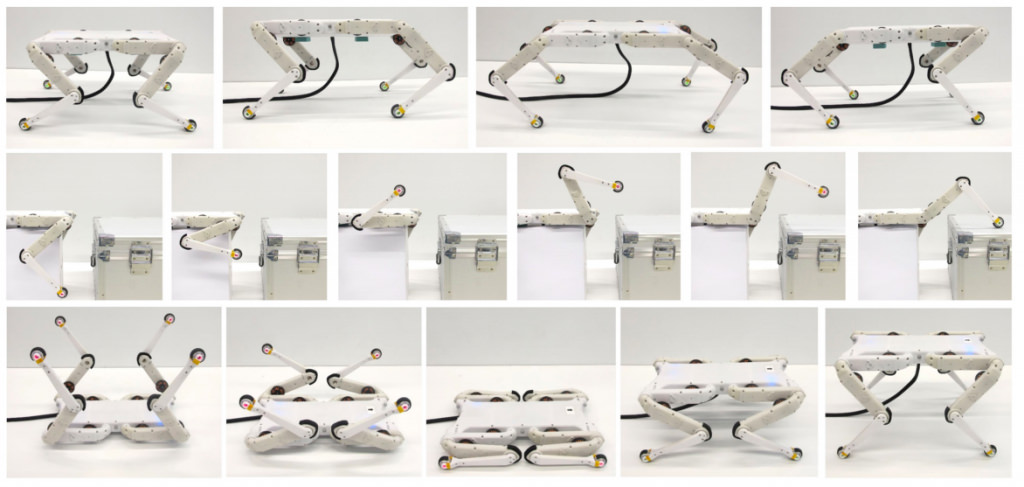
研究チームは次のステップとして、4足歩行ロボットの新しいバージョン「Solo 12」の開発を進めている。この「Solo 12」は、脚毎に3個づつ合計12個のアクチュエータを搭載。初期テストにおいては、前モデルよりも汎用性が高く、複雑な行動を幅広く実行できることが確認されている。

関連記事
- AI搭載の高性能な3Dプリント製犬型ロボット
- 環境やインフラ問題に対応する自律型3Dプリントシステム
- Arevo大規模な複合材AM施設の建設を発表
- 環境やインフラ問題に対応する自律型3Dプリントシステム
- 腸内環境を監視する3Dプリント製ピル
- リサイクル可能な未来型3Dプリント住宅「TERA」
- ドバイの高級住宅街に3Dプリントモデルハウスを建設
- ロボットと3Dプリンタで自動車部品の修理を自動化
- 2020年、東京に3Dプリント寿司店がオープン
- 欧州の建設用3Dプリンタ企業が中東で3Dプリント住宅を建築
- 世界初の3Dプリント住宅コミュニティが建設開始
- 3Dプリントベンチが自動車事故から歩行者を保護
- 博物館に設置される巨大な3Dプリント製ファサード
- ノートルダム大聖堂再建に3Dスキャン技術を活用!?
- ロボットと3Dプリンタで建設された世界初のスマート住宅
- 世界最長のコンクリート製3Dプリント歩道橋
- 世界最長の樹脂製3Dプリント歩道橋が開通
- 建設用大型3Dプリントシステム「ARCS」
3DP id.arts の最新投稿をお届けする「Newsletter 3DP id.arts」への登録はこちら
最新情報をお届けします
Twitter でid.artsをフォローしよう!
Follow @idarts_jp





