
- 2018-9-8
- 最新情報
- 3DPrinting, 3Dプリンティング, DYSON, Education, JDA, Medical, robot, ダイソン, ダイソンアワード, テクノロジー, ロボット, 医療, 教材, 教育

JAMES DYSON AWARD 2018国内最優秀賞はスマートおしゃぶり「YourPacifier」に決定
一般財団法人ジェームズダイソン財団は、主催する国際エンジニアリングアワード『JAMES DYSON AWARD 2018(以下、JDA)』国内最優秀賞作品を含む上位3作品を発表した。

JDAは、次世代デザインエンジニアの支援・育成を目的に毎年開催している国際エンジニアリングアワードで、今年は世界27の国と地域で開催から1,300を超える作品が集まり、国内最優秀賞作品を含む上位3作品を決定した。
JDA2018 国内最優秀賞『YourPacifier』

YourPacifierは、赤ちゃんと両親をサポートするスマートおしゃぶり。赤ちゃんが脱水状態の時に、赤ちゃんへの水分補給と保護者の取るべき行動のサポートを目的としたデバイス。センサーが赤ちゃんの唇から脱水を検知し、連携するスマートフォンアプリを通じて保護者に取るべき行動を指示。さらにデータを収集し、病気の流行を検出することができるため、その情報を病院が共有することで感染状況の把握にも役立てられます。
製作者
山蔦 栄太郎 大阪大学 大学院工学研究科 機械工学専攻
杉本 実夏 筑波大学 大学院グローバル教育院研究科 エンパワーメント情報学プログラム専攻
荒川 陸 東京大学 工学部 計数工学科 システム情報工学コース
長沼 大樹 東京工業大学 情報理工学院 情報工学系
後 雄大 早稲田大学 先進理工学部 電気情報生命工学科 卒業
寺本 将行 大阪大学 医学部 医学科 卒業
JDA2018 国内審査員 緒方 壽人氏よりコメント
「赤ちゃんの脱水状態を検知してスマートフォンに通知するIoT おしゃぶりの提案である。アジア太平洋諸島で公衆衛生調査をしていたチームメンバーが発見した乳幼児のウイルス感染という課題に対して、水分量をセンシングすることで脱水の初期症状である唇の乾燥を検知し、重篤な症状に至る前に適切な処置を促す「スマートおしゃぶり」を考案し、原理試作も行なって
いる。技術的にまだ様々な課題もあると思われるが、ヘルスケア分野において、センサーなどのIoT 技術によって人間が気づきにくい体のわずかな変化をいち早く検知することは有効なアプローチであり、途上国を含めてグローバルな課題を解決するアイデアとして、今後のさらなる改良による実用化に期待したい。また、医療機関との連携や収集されたデータによるウイルス
感染マップの可視化なども視野に入れた提案になっている点も評価した。」
JDA2018 国内審査員 川上典李子氏よりコメント
「ロタウィルスによる乳児死亡率の高さへの関心に始まり、口から得られる多数のバイタル情報に着目、医学専門家もまじえた開発プロセスによって、切実な課題の解決に向かおうとしている意欲を評価したい。脱水状態を始めとする症状を判断できるセンサーやデータ収集でウィルス感染地域の状況を判断できるシステム等、公衆衛生の多様な課題に対するブレークスルー
となりうる可能性を感じる。グローバルに活用されるプロダクトを目ざし、より具体的な検討をぜひとも進めてほしい。」
JDA2018 国内準優秀賞『Origami-hand』

高齢化が進んでいる現在、人手不足や重労働の問題を解決するためにロボットの導入が進んできている。しかし衛生面やコストの問題が壁となり、適用することがまだ難しい環境も多数存在する。これに対し、紙などのシート状部品のみを使用することで複雑な動作が可能で低価格で実現できるロボットハンドを開発。紙で構成することで、使用後は交換するなど従来のエンドエフェクタではできなかった使い方も可能となる。
製作者
手塚 蒼太氏 東京都立産業技術高等専門学校 ものづくり工学科
JDA2018 国内審査員 緒方 壽人氏よりコメント
「使い捨て可能な折り紙ロボットハンドである。既存の多くのロボットハンドが機械部品を用いた機構を使用しているのに対して、「折り紙」に着想を得て、1枚の紙から1本の指の構造と折り曲げ機構を同時に作り出している点がユニークである。また、試作を繰り返して検証と改善が重ねられている開発のプロセスも評価した。対象物に沿って複数関節が連動して曲がる機構によって様々な物を掴むことができ、柔らかい素材のため安全でもある。紙という安価な材料を使っているため使い捨てが可能で衛生的、形状サイズの展開自由度も高いなど、様々な利点が感じられた。把持力や強度は既存のアームに劣る部分はあるが、それを補うよりもこれまでなかった新しい応用分野の開拓を期待したい。」
JDA2018 国内審査員 川上典李子氏よりコメント
「紙の折り目をロボットハンドのヒンジとして活用するという画期的な発想のもと、コストを抑えた製造を可能し、交換可能であることから衛生面にも配慮したロボットハンドの提案である。一枚の紙を折ることで生み出される理のある造形も魅力で、その試行錯誤の過程や2 本指モデルの把持実験が説得力を備える。費用的な理由でロボット使用が難しかった中小規模の工場への導入、発展途上国における製造環境の向上など、生産現場の環境を変えうる汎用性にも期待が高まる。」
JDA 2018 国内第3位『F3Hand』
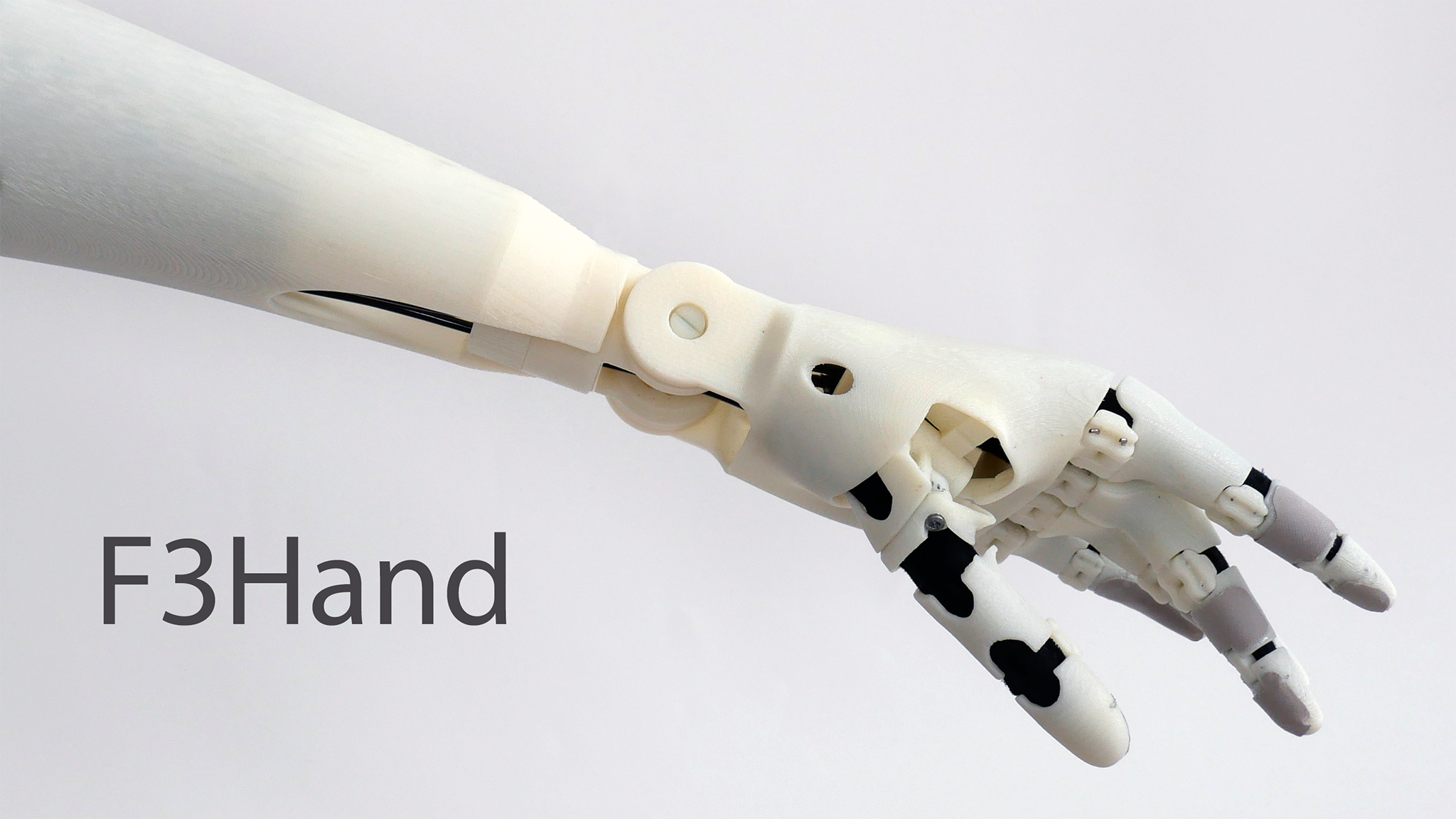
一般に5指電動義手は電動アクチュエータにより対象を把持できるものの重さや柔軟な把持といった点に課題がある。F3Hand は湾曲型空気圧人工筋を用いて駆動する義手で、5 指が人間の手と同様に配置され、各指は2 重関節を備える。湾曲型空気圧人工筋を指の骨格兼アクチュエータとして用いることで軽量化し,柔軟な把持と自然な動作を実現している。
製作者
根本 裕介氏 大阪工業大学大学院 ロボティクス&デザイン工学研究科 ロボティクス&デザイン工学専攻
JDA2018 国内審査員 緒方 壽人氏よりコメント
「空気圧人工筋を骨格に用いた5 指義手である。空気圧駆動の関節構造もよく工夫され、ソケットを含む総重量250g と非常に軽量で、モーターや機械部品を用いないため動作音も静かである。関節は、空気圧チューブを弾力性の異なる2種類の素材で挟むことで、送り込まれる空気の圧力によって関節が曲がる二重構造も秀逸で、対象物に馴染んで柔軟に曲がり様々な物を掴むことができる。義手ユーザーに対するインタビューなどから、軽量化と柔軟な把持という課題を発見し、試作やユーザー検証を繰り返し行いながら進められている開発のプロセスも説得力があり、丁寧にスタイリングされた外観も含めて、ユーザーが生活の中で実用的に身につけるものとしての完成度が高い点を評価した。」
JDA2018 国内審査員 川上典李子氏よりコメント
「湾曲型空気圧人工筋を骨格兼アクチュエータとして用いることで、従来の5 指電動義手の3 分の1 以下という軽量性が実現されている。その動きは自然でなめらか。柔軟な把持に関する研究やテストの繰り返しなど、前腕欠損者に対する5指義手の改良に向けた真摯な姿勢も高く評価する。今後、指ごとの動きに関する研究等も重ねられることで、使いやすく軽量な義手を希求するユーザーに対する新たな可能性の扉を開いていってほしい。」
上記3作品は、他国の作品群とともに国際ステージ(第2次審査)に進み、選ばれたTOP20作品が、ダイソン創業者ジェームズ ダイソンによる国際最終審査に進む。
今後の選考結果は、TOP20を9月21日(金)に、最終審査を11月15日(木)に発表予定。国際最優秀賞受賞者には、トロフィーと賞金30,000ポンド(約435万円)を、受賞者が在籍または卒業した教育機関に寄付金約5,000ポンド(約72.5万円)が贈られる。
作品は全てJDAホームページ上で公開されている。
関連記事
- exiii総額約8000万円の資金調達を実施
- exiiiはCADデータに触れる3Dレビューシステムを開発
- ダイソンはエンジニア教育のため学生ビレッジを建設
- GEはSTEM教育の一環として400台以上の3Dプリンタを支給
- ダイソン英国に2つ目の開発拠点を開設
- ダイソンはシンガポールで未来へ投資
- IoTデバイスを一個から製造する装置「FABRICATOR」
- 『MOMENT S』数量限定特別価格販売のお知らせ
- 2018年前期「3Dプリンター活用技術検定試験」申込開始
- ファブ人材発掘「ファブ3Dコンテスト2018」開催
- 次世代小型3Dプリンタ「Adventurer 3」
最新情報をお届けします
Twitter でid.artsをフォローしよう!
Follow @idarts_jp





