
- 2023-1-24
- フィラメント・材料, 最新情報
- 3DPrinter, 3DPrinting, 3Dプリンター, 3Dプリンティング, FDM・FFF, filament, テクノロジー, フィラメント

ハーバード大学、ソフトロボティクス等に応用可能な回転マルチマテリアル3Dプリント方式を開発
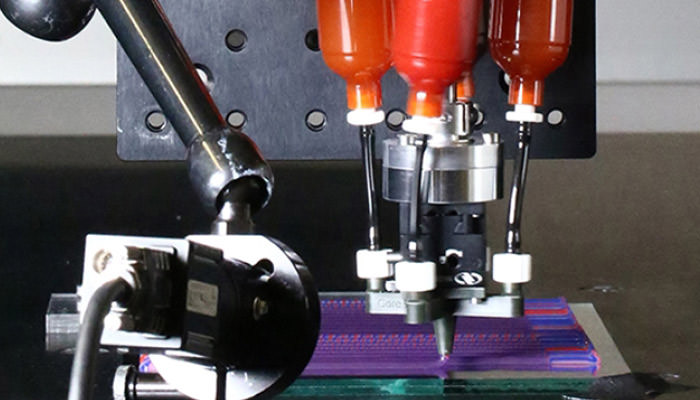
ハーバード大学の研究チームは、植物の螺旋状の構造に基づき、4種類の素材と回転するノズルを組み合わせて、螺旋状のフィラメントを堆積させる革新的な回転マルチマテリアル3Dプリント法(RM 3DP)を開発した。研究チームはこれまでに様々な剛性の構造体を3Dプリントしており、ロボット工学などの多くの分野への応用が期待されている。
RM 3DPプロセスは、異なるインクが入った4つのインクカートリッジで構成されており、それぞれのカートリッジに異なる材料を入れ、複雑に回転するノズルに接続して動かすことで、押し出されたインクが螺旋状の形状を持つフィラメントを形成する。この研究の著者であるNatalie Larson氏は「マルチマテリアル回転式3Dプリントにより、機能的ならせん状フィラメントや構造格子を精密に制御して生成し、最終的に高い性能を実現することができます」と説明している。
研究者らは、角速度と並進速度の比率を制御しながらマルチマテリアルノズルを連続的に回転させることにより、与えられた円筒形のボクセル内で、複数の材料間の螺旋角度、層厚、界面面積をプログラム可能な螺旋状フィラメントを作成。この方法を用いて、誘電体エラストマーマトリックス内に埋め込まれた、忠実度が高く個別にアドレス指定可能な導電性螺旋チャンネルを持つ螺旋状誘電体エラストマーアクチュエーターからなる、機能的人工筋肉を作製した。更に研究チームは、コンプライアント・マトリックス内に硬いバネを含むらせん状の支柱を設計して、階層的な格子を作製。この新しいアディティブ・マニュファクチャリング・プラットフォームは、バイオインスパイアード・モチーフの多機能アーキテクトを生成する新しい道を切り開くと期待されている。

さらに研究チームは、柔らかいマットレスの中の金属バネのように、柔らかいコンプライアントなマトリックス内に硬いらせんバネを埋め込んで、さまざまな硬さをもつ構造格子を設計。マトリックス内のスプリングの密度を調整することで、材料全体の剛性を調節することが可能な螺旋構造は、ソフトロボット・システムの関節やヒンジに応用することができる。
研究チームはこの新しい3Dプリント方法を活かし、さらに複雑な構造をつくることを目指しており、Larson教授は 「より極端な内部特性を持つノズルを設計・製造することで、これらの階層的なバイオインスパイアード構造の解像度、複雑さ、性能をさらに高めることができます」と述べている。
関連記事
- シリコン3Dプリント用サポート材
- PPE廃棄物を3Dプリント用の材料に
- リアルな木材製品が造れる3Dプリンタ「Shop System Forust Edition」
- ポリマーAM市場、2030年までに年間340億ドル超へ
- 絶縁性や耐薬品性を兼ね備えたフィラメント「Filaflex SEBS」
- 有害物質を無害な物質に変換するフィラメント「Purifier」
- 導電性フレキシブルTPUフィラメント「Conductive Filaflex」
- 耐衝撃性・耐薬品性PPフィラメント「PP3D」
3DP id.arts の最新投稿をお届けする「Newsletter 3DP id.arts」への登録はこちら
最新情報をお届けします
Twitter でid.artsをフォローしよう!
Follow @idarts_jp





