
- 2017-1-19
- VR・AR・MR, 最新情報
- 3DPrinter, 3DPrinting, 3Dプリンター, 3Dプリンティング, DMM, DMM.make, DMM.make AKIBA, exiii, EXOS, HACKberry, Handie, Open Sourse, VR, オープンソース, バーチャル, 医療, 教材, 教育, 義手, 義肢, 義足

筋電義手を開発するexiiiは仮想空間内でモノに触れる外骨格型触覚デバイス「EXOS」を開発
James Dyson Foundationで入賞した『Handie』や、オープンソース筋電義手『HACKberry』を手がけてきたハードウェアスタートアップexiiiは、新体制移行後初となる開発モデルとして、外骨格型の力触覚提示デバイス『EXOS(エクソス)』を発表した。
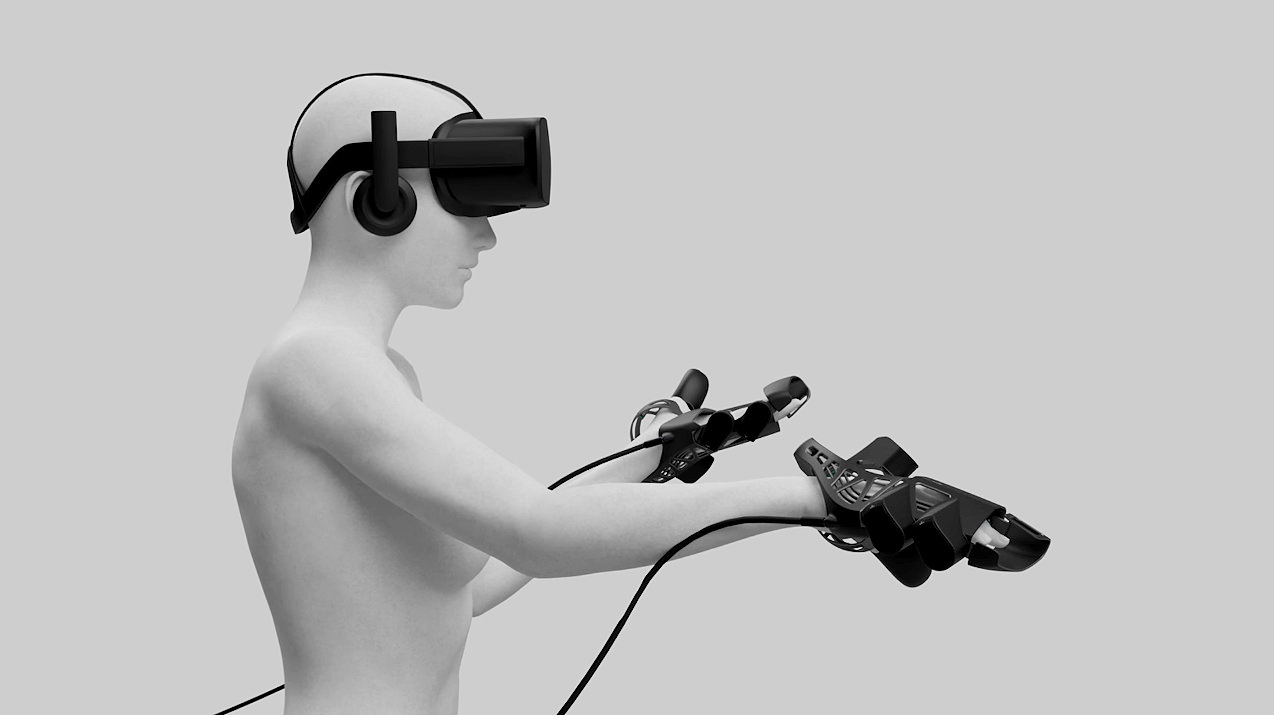
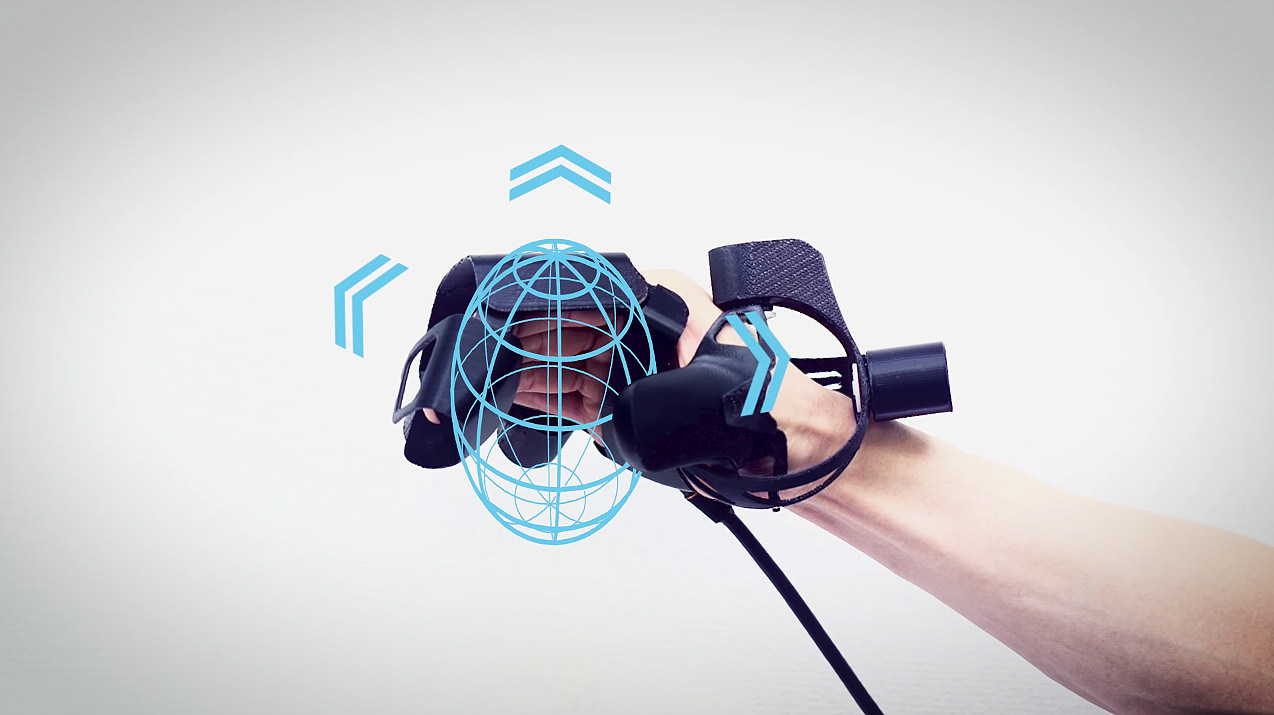
新たな分野としてVR向けのウェアラブルデバイスの開発に取り組む同社が発表したEXOSは、外骨格型の力触覚提示デバイスで、内臓されたモーターを制御することより、手が物に触れた際に生じる反力を再現し、身につけた人の手にバーチャルな空間内で実物に触れた感覚を与えることができるデバイスとなっている。
このEXOSを利用することで、VRゲームやロボットの遠隔操作、手を動かすためのリハビリ等への応用が期待されている。


EXOSは、独自の外骨格機構によりガタや歪みを抑え、関節角度や力を利用者に正確に伝えることができるよう設計されており、同社の義手開発知見に基づいて配置された四箇所の関節が、摘まみや握りといった、手の基本動作を十分にカバーすることができる。
同社では、今回のコンセプトモデルをベースに協力企業やエンジニアの募集を行っている。詳細情報、問い合わせは以下通り。
採用に関するお問い合わせ先:jobs@exiii.jp
採用に関する情報:http://exiii.jp/recruit/
関連記事
- 癒し系バーチャルホームロボット「Gatebox」予約販売開始
- Hololens対応の新SketchUp Viewerリリース
- SkinterfaceがリモートSEXへの扉を開く
- Minecraft新バージョンでOculus Riftプレイに対応
- exiiiが新たなオープンソース義手プロジェクトを公開
- 一枚の顔写真からリアルな3D顔モデルを生成!
- プロトタイピングを支援するファンド組成誕生
- HoloLensとFusion 360で実現する開発環境
- Hololensの開発キットは2016年Q1にローンチ
最新情報をお届けします
Twitter でid.artsをフォローしよう!
Follow @idarts_jp





