
- 2023-7-17
- 最新情報
- 3DFS, 3DPrinter, 3DPrinting, 3DPS, 3Dプリンター, 3Dプリンティング, BMF, eco, SLA, VR, テクノロジー, 光造形

高精度3Dプリンターによるワイヤレスモジュールロボット製造
多用途で適応性のあるシステムの探求は、ロボット研究の原動力となっている。従来のロボットシステムは固定された構造に依存しており、ダイナミックな環境での適応性に限界があった。ロボットが必要に応じて形状や機能を自在に変えることができれば、さまざまな状況でより有用になる。南メソジスト大学のBAST(Biological, Actuation, Sensing, and Transport)研究室で機械工学の博士号を取得中のAnuruddha Bhattacharjee氏は、マグネットコネクターと埋め込みマグネットを備えたモジュール式ロボットキューブのエンジニアリングに着手し、相互作用してさまざまな構成を形成できるようにした。これらのモジュラー・ロボティック・キューブは、外部の磁気コントローラーを使ってワイヤレスで操作され、ミリ/マイクロスケールの再構成可能なロボット・システムの新たな道を開いた。
モジュールロボットの設計
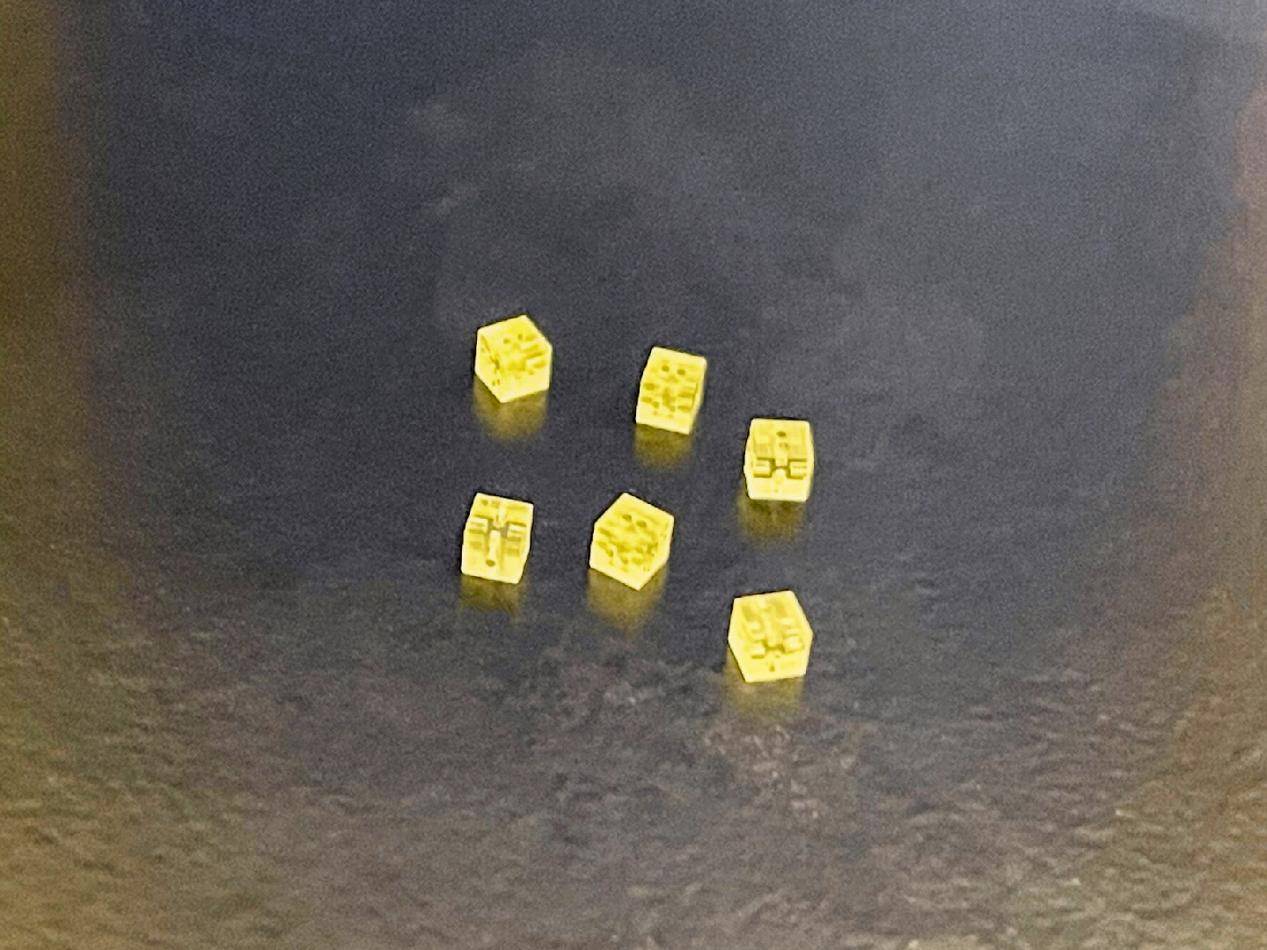
Bhattacharjee博士は、外部の磁気コントローラーで操作できる、磁石を埋め込んだ機能的なモジュラー・キューブを設計・製作する必要があった。キューブは2mmの縁に300μmの穴が10個開いており、磁石が埋め込まれている。キューブが正しく動作するためには、磁石を埋め込むための精密な微細穴が必要であり、研究チームはこの要件を満たすため、高精度な3Dプリンティング技術である「projection micro stereolithography (PµSL)」を採用。
キューブのワイヤレス制御
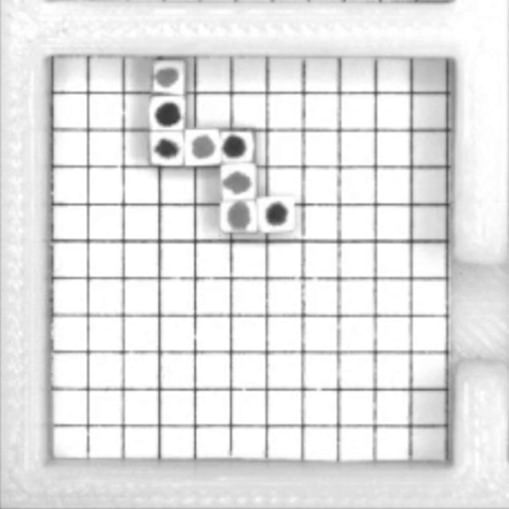
磁石を組み込んだ機能的なモジュラーキューブを作製した後、電磁3軸ヘルムホルツコイルのセットアップで、制御された自己組立、オンデマンドの分解、再構成作業をテスト。モジュラーロボットの自己組立を成功させるためには、個々のキューブの正確な動きが重要で、正確な動きはキューブの製作精度に依存する。標準的な3Dプリンターでは必要な精度と正確さを再現出来ないため、Bhattacharjee博士は「BMF microArch S140」を使用することで正確な寸法のキューブを実現し、次のようなコメントを発表している。
「わずか2週間で、3Dプリントされたパーツが届きました。microArch S140は、私たちの設計ファイルに基づいて正確な寸法を正確に出力してくれました。BMFチームの効果的なコミュニケーションにより、研究プロセスを加速させ、予想よりも早く結果を得ることができました。BMFの効率的なコミュニケーション、製品の納品、対応の良さを考えると、BMFは長期的な協力関係を築ける信頼できるパートナーとして強くお勧めします。」
再構成可能なモジュラーロボットは、外部の磁気コントローラによってワイヤレスに操作することができ、命令に従って自己組立や分解を行うことができる。PµSL技術で製造された小型キューブと生体適合性材料の利用可能性により、磁気モジュラーロボットを手術器具や生物医学用途に活用する可能性が広がる。
関連記事
3DP id.arts の最新投稿をお届けする「Newsletter 3DP id.arts」への登録はこちら
最新情報をお届けします
Twitter でid.artsをフォローしよう!
Follow @idarts_jp





