

MIT、3Dプリント技術を活用し多方向に収縮可能な人工筋組織を開発
マサチューセッツ工科大学(MIT)の研究チームは、3Dプリント技術を用いて多方向に収縮可能な人工筋組織の開発に成功した。Biomaterials Science 誌に掲載されたこの技術は、筋力を動力源とするバイオハイブリッドロボットの柔軟性と多様性を大幅に向上させる可能性がある。
 同心円状と放射状に引っ張る人工の筋力構造
同心円状と放射状に引っ張る人工の筋力構造
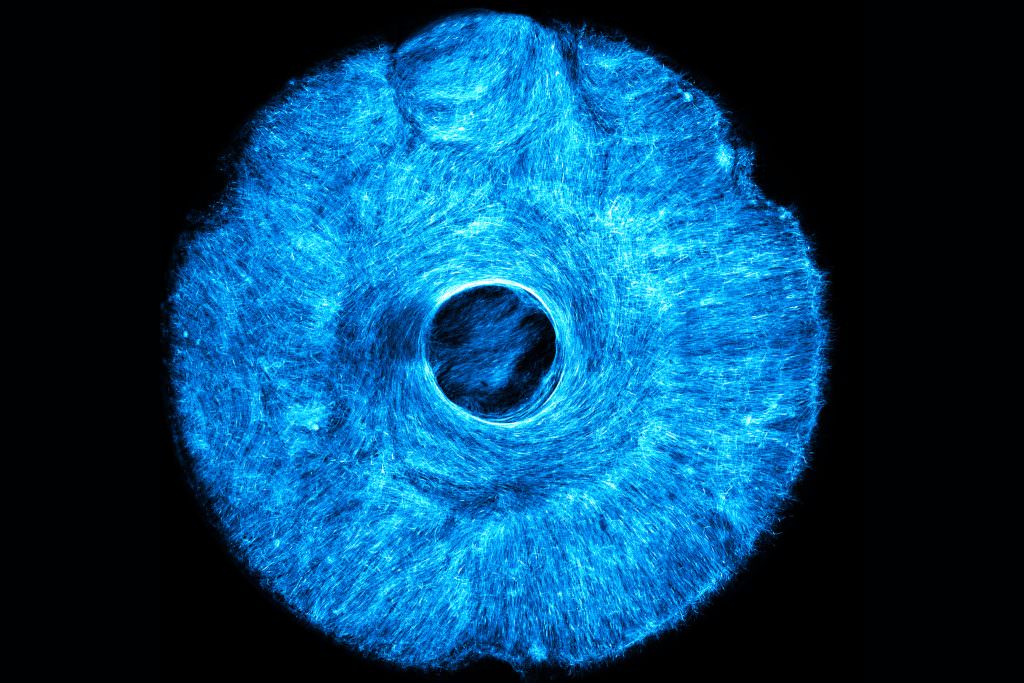
従来のロボット工学における培養筋繊維は、単一方向の運動に限られており、可動範囲が制約されていた。しかし、今回の新しいアプローチは人間の虹彩に着想を得ており、人工筋肉が同心円状および放射状に収縮することを可能にした。
この革新的な技術の中心となるのは、細胞1個分の幅の微細な溝が刻まれた3Dプリント製の「スタンプ」で、このスタンプをヒドロゲルに押し付け、遺伝子操作された筋細胞を播種すると、溝が筋繊維の配向の設計図として機能する。
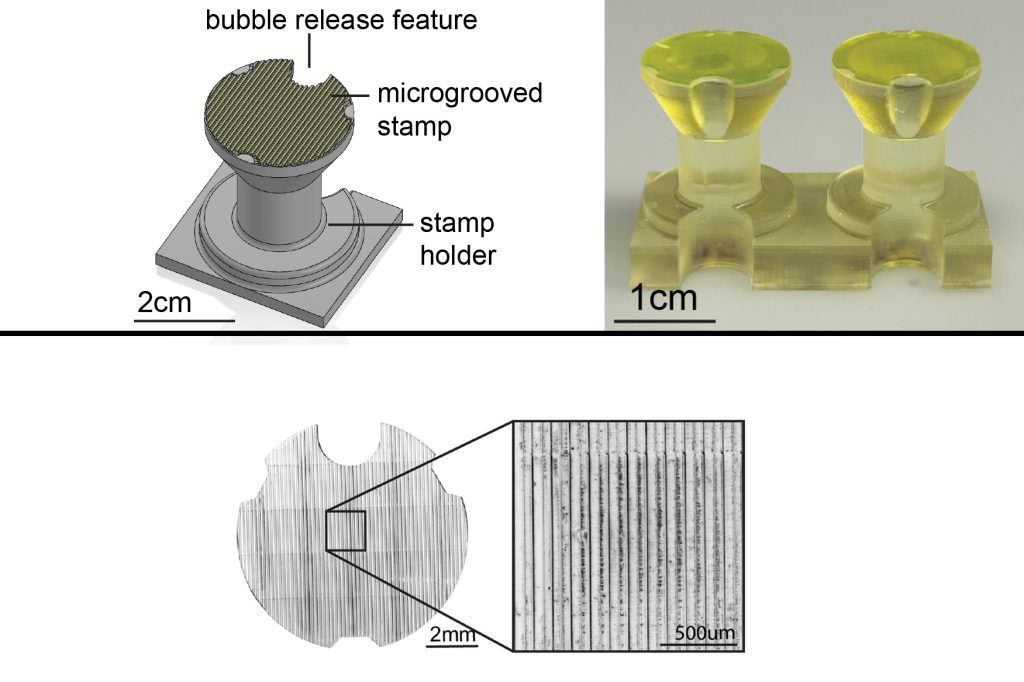 微細な溝が刻まれた小型のスタンプを3Dプリント
微細な溝が刻まれた小型のスタンプを3Dプリント
このスタンプデザインは、瞳孔の拡張と収縮を可能にする人間の虹彩の層状の筋構造を模倣しており、光にさらされると、人工筋肉は同様の多方向性の収縮を示す。実際の人間の虹彩は平滑筋で構成されているが、研究者たちはこの方法の柔軟性を示すために骨格筋細胞を使用した。
MITの組織工学のユージン・ベル・キャリア開発教授であるリツ・ラマン氏は「虹彩のデザインを用いることで、複数の方向に力を発生させることができる最初の骨格筋駆動ロボットを実証できたと考えています。これは、このスタンプアプローチによって独自に可能になりました」と述べている。
米国海軍研究局、陸軍研究局、国立科学財団、国立衛生研究所の支援を受けているこの研究は、ロボット工学への応用にとどまらず、ニューロンや心筋などの複雑な生体組織の工学にも応用できる可能性がある。さらに特筆すべきは、スタンプが一般的なデスクトップ3Dプリンターで作製可能であり、この技術が広く利用可能であることである。
関連記事
- MIT、エイにヒントを得た浄水器を3Dプリント
- 重力を超えた3Dプリントハンドバッグ
- 3Dプリント技術で半導体不要の電子デバイスを開発
- MITとTU Delft、多素材3Dプリント技術を革新
- リサイクルガラスを3Dプリントした建築用ブロック
3DP id.arts の最新投稿をお届けするニュースレターへの登録はこちら
最新情報をお届けします
Twitter でid.artsをフォローしよう!
Follow @idarts_jp





