

UT Austinが3Dプリンターで造る磁気操作カプセルロボを開発、内視鏡検査の負担軽減を狙う
米テキサス大学オースティン校の研究チームは、胃腸内を外部磁場で操れるカプセル型ロボットを3Dプリンターで試作し、侵襲的な内視鏡検査への依存を減らすことを目的に研究を進めている。
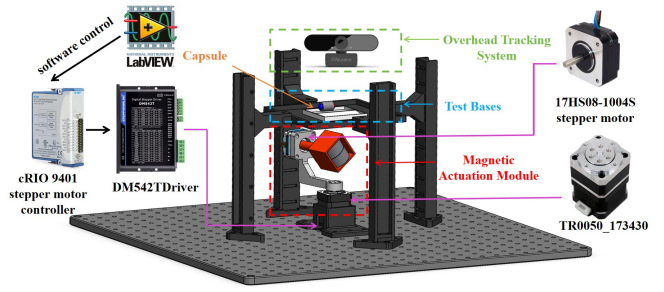
実験装置の概要
従来の内視鏡検査はチューブを体内に挿入する必要があり、喉の痛みや強い不快感を伴う場合があるが、このカプセルロボットは、薬のように飲み込んだ後、体外から磁場を使って移動方向をコントロールすることできる。
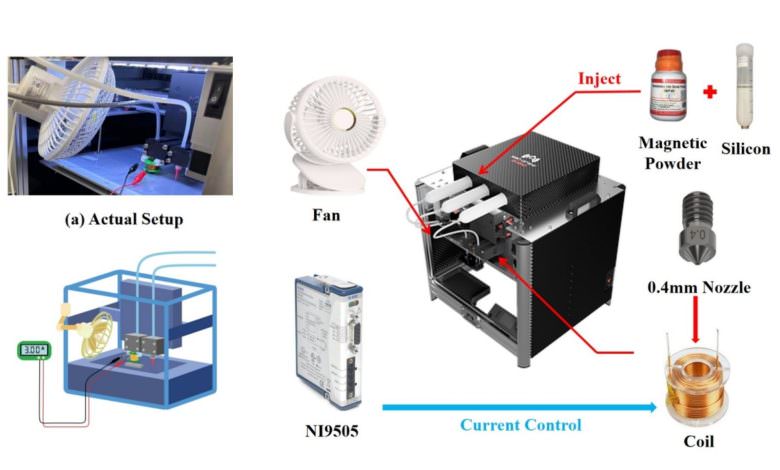
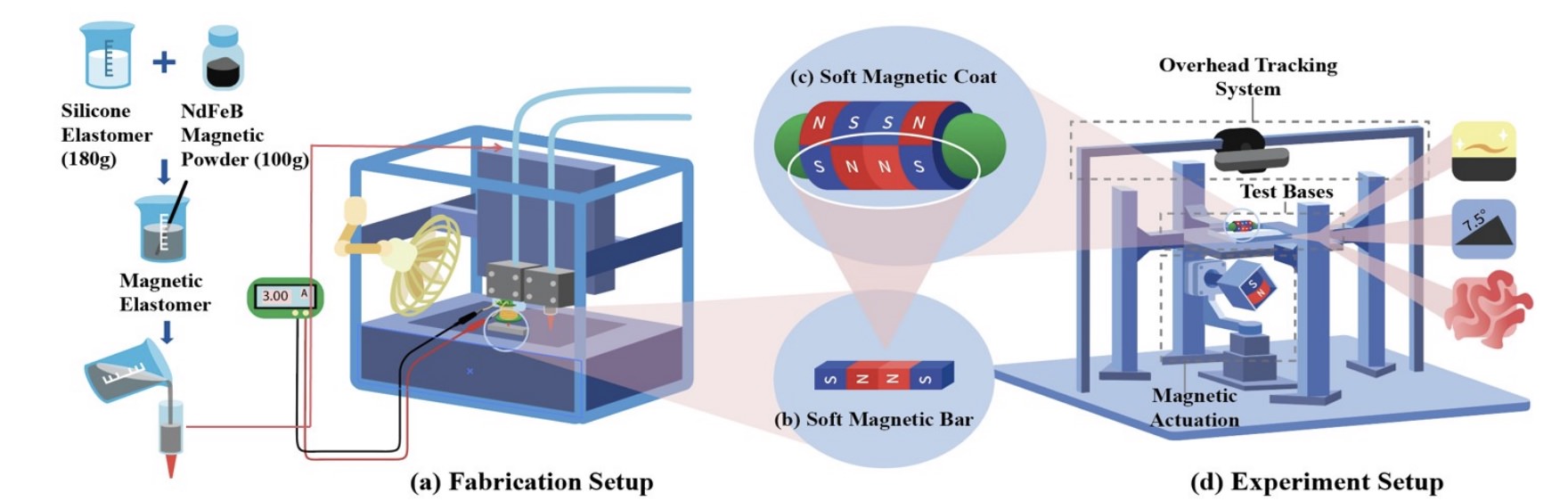
技術的な最大の特徴は、カプセル内部ではなく「外殻」に磁気機能を持たせた設計にある。ネオジム磁性粒子を混ぜた柔らかい材料を用い、それを3Dプリント技術で成形する際に磁化の向きを制御することで、外部磁場に対して安定して転がりながら移動できる構造を実現した。内部に大きな磁石を入れる必要がないため、カメラやセンサー、薬剤タンク、生検ツールなどを搭載できるスペースを確保できる。
研究チームは、乾いた面や濡れた面、傾斜面など胃の環境に近い条件で走行実験を行い、安定した移動性能を確認。複雑な制御システムを使わなくても操作できる点は、将来の医療現場での実用化に向けた重要な要素となる。
多様な試験台を備えた実験装置
すでにカプセル内視鏡は実用化されているが、多くは体内を自然に流れるだけで位置制御が難しい。本技術は磁気操作によって「止まる・動く・方向を変える」ことを可能にし、より精密な診断や局所治療への発展が期待される。一方で、実際の人体環境での安全性や操作装置の小型化など、臨床応用には今後の検証が必要だ。
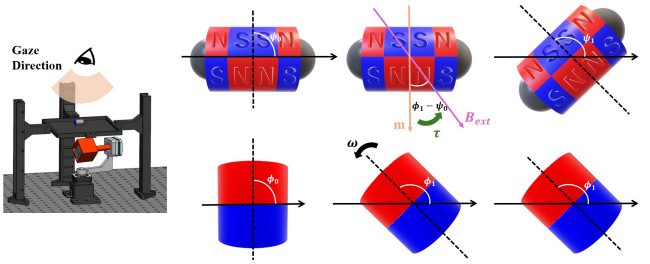
実験装置の俯瞰図。外部磁石のz軸周りの回転によるカプセルのヨー運動を示す。
3Dプリンターによる製造は、形状や材料特性を迅速に改良できるため、医療ロボット開発のスピードを大きく高める可能性があり、将来的には、体内を移動しながら診断・投薬・簡易治療を行う次世代医療デバイスとしての活用が期待されている。
関連記事
3DP id.arts の最新投稿をお届けするニュースレターへの登録はこちら
最新情報をお届けします
Twitter でid.artsをフォローしよう!
Follow @idarts_jp





